
基于变刚度阻抗控制器的外骨骼机器人柔顺性控制技术
发布时间:2024-01-13
发布:中非创新合作中心
来源:2023对非先进适用技术项目合辑
字号


成果简介
下肢外骨骼机器人是一种能够帮助使用者抵御外部冲击力、强化人体负重与支撑能力的穿戴式机电设备。在穿戴外骨骼后,使用者能够在一定程度上获得外部助力,实现自身能力的强化。
根据人体生理结构特点,设计了符合人体关节运动自由度的多自由度下肢外骨骼机器人。设计了一种基于IMU(Inertial Measurement Unit)传感器的动作识别系统。它能够以较低的成本为下肢外骨骼机器人提供运动意图识别能力,解决下肢外骨骼机器人下肢外骨骼对人体运动状态的识别能力差的问题。
设计了基于力传感器的变刚度阻抗运动控制器。基于阻抗控制的力控制法结合人机交互力的特性,优化了不同工作模式下的下肢外骨骼支撑性能与柔顺性,提高下肢外骨骼的柔顺性与多工况适应性。
自主研发
设计了人机交互的下肢外骨骼机器人仿真运动平台,用于运动同步测试。
根据人体生理结构特点,设计了符合人体关节运动自由度的多自由度下肢外骨骼机器人一套,用于运动算法测试。
基于IMU(Inertial Measurement Unit)传感器的动作识别系统一套,用于为下肢外骨骼机器人提供运动意图识别能力。
设计了用于外骨骼的变刚度的阻抗控制器,优化了不同工作模式下的下肢外骨骼支撑性能与柔顺性,提高下肢外骨骼的柔顺性与多工况适应性。

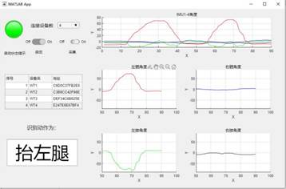
多自由度下肢外骨骼机器人样机 基于IMU动作识别系统

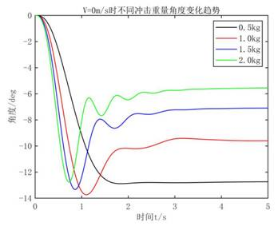
不同外力变阻抗运动轨迹 变外力阻抗控制测试曲线
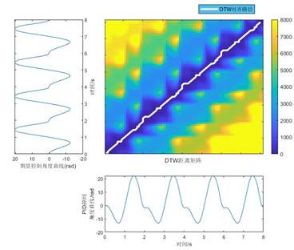
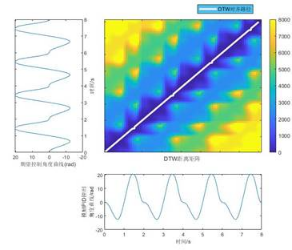
髋关节普通 PID 控制对齐路径图 髋关节柔顺控制对齐路径图
分享到




最新资讯Latest News




